
واژهی LPC(License plate capture) یا کپچر پلاک خودرو، توانایی دوربین پلاک خوان برای کپچر تصاویر قابل خواندن از پلاک خودرو است. این توانایی در مبحث تشخیص پلاک خودرو یا (License plate recognition)LPR کاربرد دارد. شماره پلاکها بطور اتوماتیک با نرم افزارهای آنالیز تجزیه تحلیل و خوانده میشوند. کاربرد LPR در اکسس کنترل، مدیریت پارکینگ یا کنترل سرعت در بزرگراهها است.
نرخ تشخیص و دقت سیستم تشخیص پلاک LPR به کیفیت تصاویری که کپچر میشود، بستگی دارد. برای سیستم LPC، کیفیت تصویر باید به اندازهای بالا باشد تا حروف و شماره پلاک را بصورت جداگانه بتواند بخواند. حداقل دو پیکسل در کوچکترین ساختار باید بکار برده شود. اما نباید آنقدر زیاد شود که میزان دادهها در تصویر باعث کند شدن تجزیه و تحلیل در نرم افزار شود. بطور خاص هنگامی که نرم افزار LPR روی دوربین هست، کیفیت تصویر نباید بیشتر از 2MP باشد.
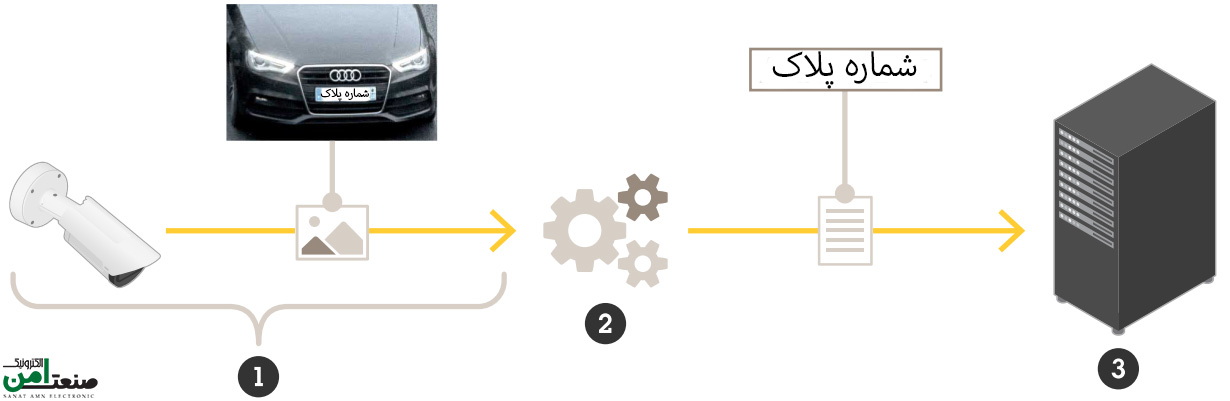
اجزای کلی یک سیستم LPR
یک سیستم پلاک خوان به سه دسته تقسیم میشود:
قسمت اول: کپچر شماره پلاک خودرو
قسمت دوم: الگوریتم نرم افزاری
قسمت سوم: دیتا بیس
نکات مهم در تشخیص شماره پلاک خودرو
- از نور اینفرارد(infrared) مصنوعی در شب استفاده کنید. این نور نامرئی است و چشم راننده را اذیت نمیکند.
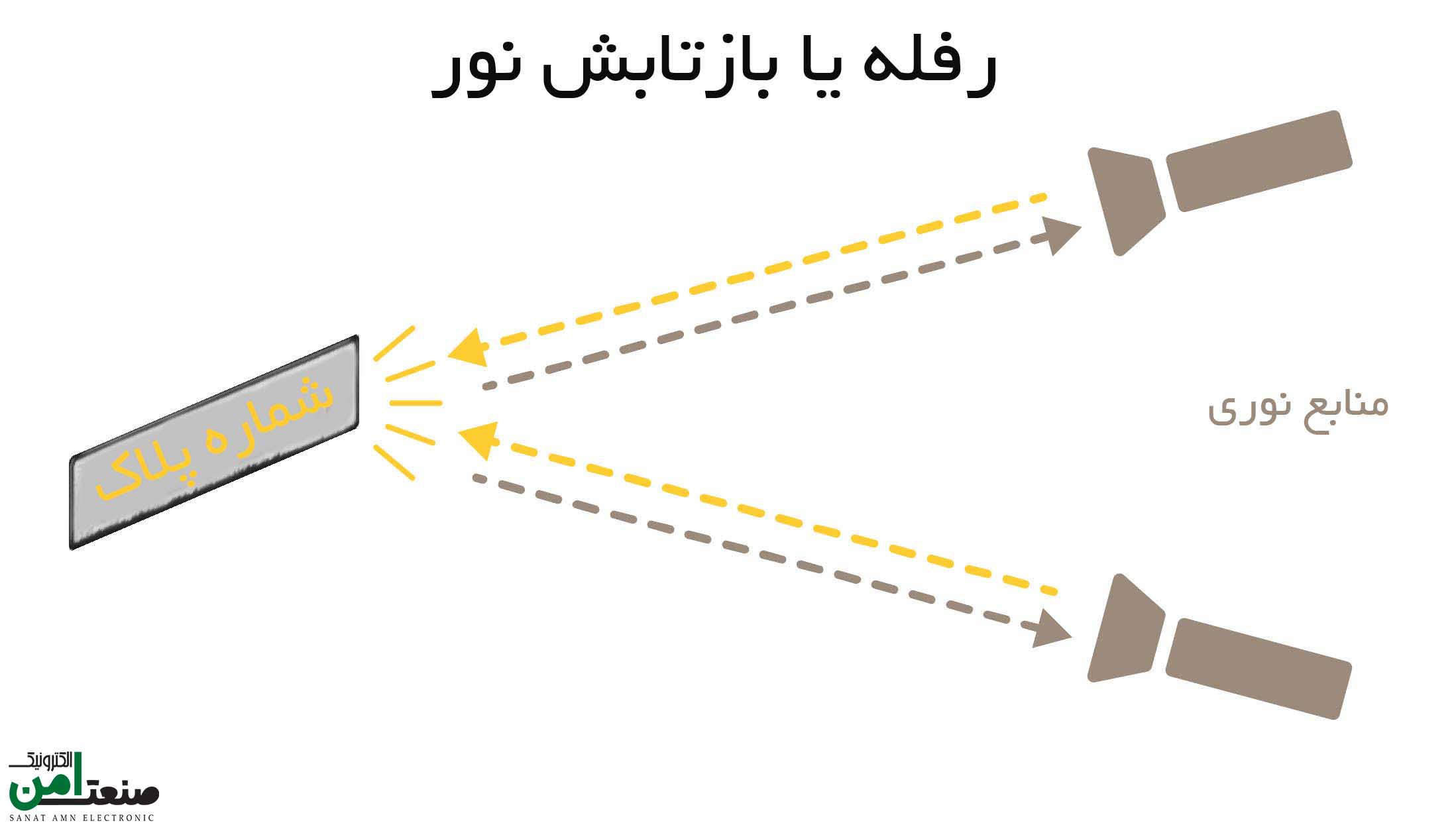
- اگر شما نیاز به استفاده از یک منبع نوری خارجی داشته باشید، تا جای ممکن آنرا نزدیک دوربین نصب کنید. دلیل آن برخورد نور به پلاک و بازتاب آن به همان منبع نوری میباشد.
- زاویه بین دوربین و جهت حرکت ماشین را کم کنید. زاویه کمتر از 30 درجه پیشنهاد میشود.
- دوربین را طوری نصب کنید که بتواند پلاکها را در مسافتی متناسب با سرعت خودرو، ثبت کند. در سرعتهای بالاتر به مسافت ضبط طولانیتری نیاز هست. تا در این حالت زمان لازم جهت خواندن پلاک وجود داشته باشد.
- برای جلوگیری از تاری تصویر در حین حرکت، حداکثر زمان شاتر را محدود کنید. زمان شاتر وابسته به زاویه نصب دوربین و همچنین سرعت وسیه نقلیه است.
- برای جلوگیری از بازتاب نور شدید روی پلاک خودرو، حداکثر گین دوربین را محدود کنید.
آشنایی با دوربین مداربسته پلاک خوان
تشخیص پلاک خودرو و دقت سیستم LPR شدیدا وابسته به کیفیت تصویر ثبت شده توسط دوربین مداربسته است. در اولین گام باید دوربین LPC، بتواند تصاویر پلاک را با شارپنس و کنتراست بالا در شرایط آب و هوایی بد، کپچر کند.
هر سیستم LPR شامل یک یا تعداد زیادی دوربین مداربسته است که تصاویر پلاک خودرو را کپچر میکند. تصاویر با نرم افزارهای آنالیز تشخیص پلاک، پردازش شده و روی دوربین یا یک سرور قرار میگیرند. نرم افزار LPR بصورت اتوماتیک شماره پلاک را گرفته و در لحظه آنرا میخواند. شماره پلاک در یک دیتابیس برای استفاده در آینده ذخیره شده، یا برای فرمانهایی مانند باز شدن گیت مورد استفاده قرار میگیرد.
در حالا ایده آل سیستم LPR باید تمام پلاکهای عبوری را به درستی بخواند. تشخیص پلاک با دوربین نیاز به مکان نصب درست و تراز در یک راستا را دارد. از طرفی، تنظیمات یک دوربین LPR با سایر دوربینها متفاوت است. تا جایی که تنظیمات کارخانه یک دوربین عادی برای کاربرد یک دوربین LPR کارایی ندارد. دو پارامتر مهم در تنظیمات دوربینها برای پلاک خوانی، زمان شاتر و تنظیمات گین است.
در تصویر سمت چپ زیر از یک دوربین با تنظیمات دیفالت برای پلاک خوانی استفاده شده است. در تصویر سمت راست نیز از یک دوربین پلاک خوان با تنظیمات خاص آن استفاده شده است.

برندهای متفاوت، نامهای متفاوت برای پلاک خوانی
برندها و کمپانیهای معتبر در دنیا برای مبحث پلاک خوانی از واژهها و مخففهای مخصوص به خوداستفاده میکنند، چند مورد آنرا ببینیم:
- ALPR: این مخفف عبارت automatic License plate capture است.
- ANPR: این مخفف عبارت automatic number platerecognition است.
- AVI: این مخفف عبارت automatic vehicle identification است.
- VLPR: این مخفف عبارت vehicle License plate capture است.
- VRI: این مخفف عبارت vehicle recognition identifier است.
- CPR: این مخفف عبارت car plate recognition است.
- CPR: این مخفف عبارت car plate reader است.
پارامترهای موثر در نصب دوربین پلاک خوان
برای نصب دوربین پلاکخوان بر روی دکل مناسب جهت تشخیص و خواندن پلاک خودروهای عبوری، زوایای پیشنهادی و فاصلهی مطلوب را در ادامه آورده ایم:
- زاویه عمودی بین 0 تا 30 درجه
- زاویه افقی بین 0 تا 30 درجه
- فاصله 10 تا 100
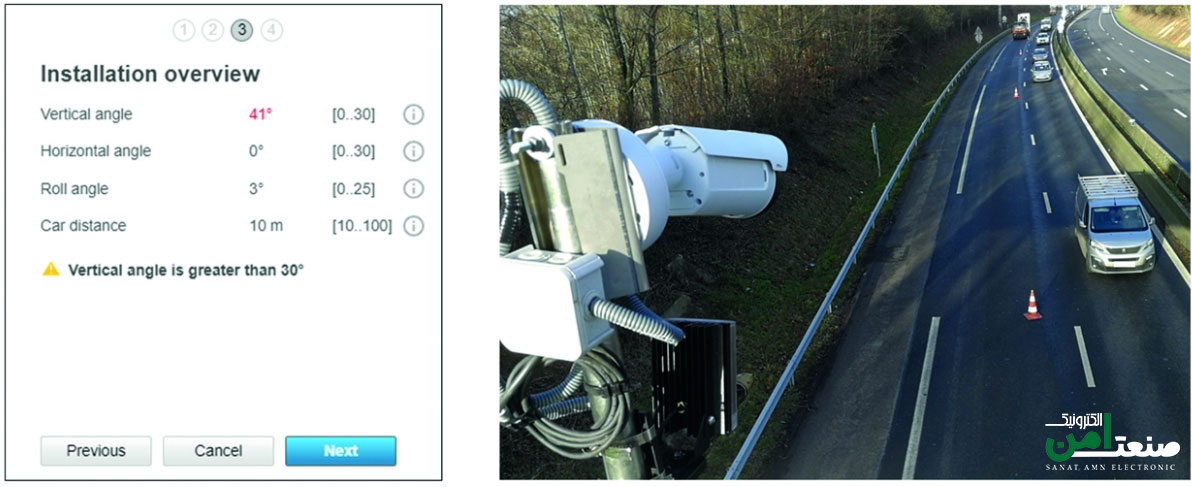
در ادامه در مورد هر کدام بیشتر صحبت خواهیم کرد
پارامترهای موثر در دوربین پلاک خوان
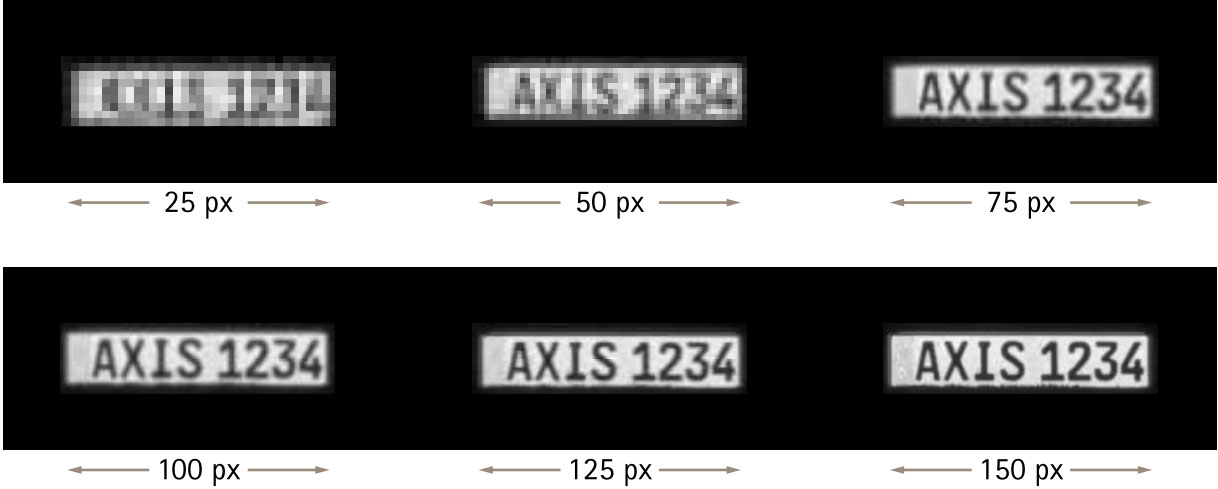
1- چگالی پیکسل Pixel density
برای قابل تشخیص بودن شماره پلاک خودرو، باید تعداد پیکسلهای کافی روی سنسور تصویر وجود داشته باشد. برای کنتراست (تضاد) کامل بین خطوط مشکی و فضای سفید، نیاز به حداقل دو پیکسل در کوچکترین ساختاری هست که ما در تصویر میخواهیم. برای یک شماره پلاک استاندارد، این به معنای نیاز به 74 پیکسل متقاطع در تمام عرض پلاک خودروست، تا خطوط را بصورت مجزا از هم نشان دهد. حداقل تعداد پیکسل مورد نیاز در حدود 100 تا 150 پیکسل در تمام عرض پلاک مد نظر است.
تعداد پیکسلهای پلاک خودرو به وضوح سنسور تصویر و میدان دید بستگی دارد. در تصویر زیر شماره 1 بیانگر عرض صحنه و شماره 2 نیز میدان دید دوربین مداربسته پلاک خوان را نشان میدهد.
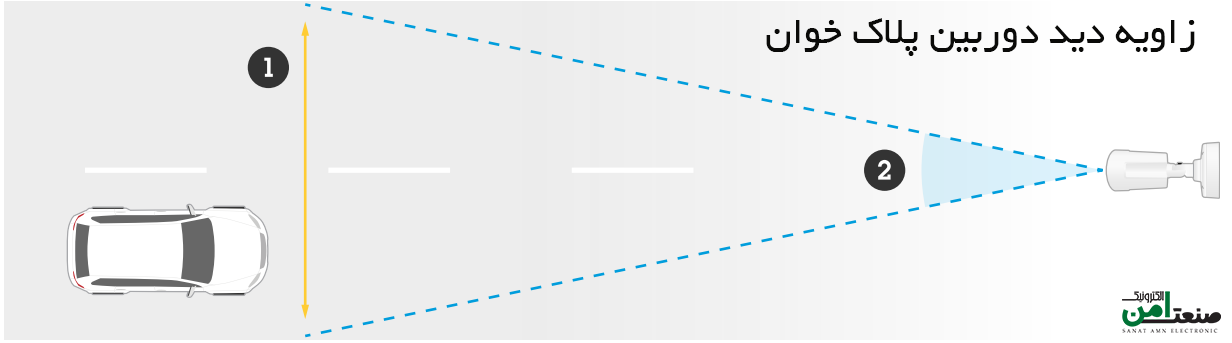
دوربین های پلاک خوان با لنزهای متغیر(موتورایز) قابلیت زوم کردن و آزادی عمل بیشتری در انتخاب زاویه دید به ما میدهد. در تصویر زیر تعداد پیکسلها در عرض، به رزولوشن دوربین و عرض صحنه وابسته است. در این مثال دوربینی با کیفیت 2MP استفاده شده است، که روی یک لاین حدود 4 متری جاده زوم شده است. در سمت راست برای دو لاین پوشش جاده با عرض حدود 6.5 متری را داریم. پوشش پلاک اولی با 250 پیکسل و دومی 154 پیکسل است.

زاویه دید به فرمت سنسور تصویر و فاصله کانونی لنز دوربین وابسته است. جدول زیر وضعیت زاویه دید افقی پیشنهادی برای پوشش یک یا دو لاین با فواصل کپچر تصویر متفاوت را نشان میدهد.
حداقل رزولوشن تصویر برای پوشش یک یا دو لاین حداقل تا 2MP میباشد. رزولوشن بالا در طولانی مدت برای آنالیز نرم افزار LPR مشکلاتی را بوجود میآورد. موقعی که نرم افزار LPR روی دوربین باشد، استفاده از دوربین تا 2 مگاپیکسل پیشنهاد میشود.
2- نور دید در شب IR Light
کپچر شماره پلاک در شب نیاز به نور مصنوعی دارد. بصورت طبیعی، نور IR، برای چشم نامرئی است و چشم راننده را اذیت نمیکند. اکثر پلاک خودروها نور IR را بازتاب میدهند، و نور IR در شرایط نوری کم و تاریکی یا آب و هوای مه آلود، دید و کنتراست پلاک را افزایش خواهد داد. نور IR میتواند از سمت LEDهای داخلی دوربین یا از منبع نوری IR که خارج از دوربین هستند، تامین شود.
2.1- نور IR و بازتابش آن
رابطهی بین شدت میزان نور با مسافت بصورت معکوس به توان دو مباشد. یعنی شدت نور با مسافت به توان2، کاهش پیدا میکند. برای مثال با دو برابرشدن فاصله بین منبع نوری از سوژه، به چهار برابر افزایش قدرت IR نیاز است.
بیشترین فاصله کپچر برای انجام تنظیمات دوربین به توان IR، زاویه IR و حساسیت نوری دوربین وابسته است. برای LPC و نیاز به جمع آوری نوری کمتر توسط دوربین به مدت زمان شاتر کمتر نیاز خواهد بود. در هر حال، بازتابش نور زیاد IR روی پلاک خودرو، برایتنس پلاک را افزایش میدهد.
2.2- منابع نور IR خارجی
جنس پلاک خودرو از مواد بازتابی ساخته شده است. این به معنای بازتابش نور استارلایت به سمت منبع نوری است. مهم نیست که نور از چه زاویهای به صفحه برخورد میکند. موقعی که از یک منبع IR خارجی استفاده میکنیم، نور IR به سمت منبع نوری بازخواهد گشت. به این دلیل، منابع نوری IR باید نزدیک دوربین باشند تا نور انعکاسی واقعا به دوربین برخورد کند. اگر منبع IR از دوربین دورتر شود، برایتنس و کنتراست پلاک به سرعت کاهش پیدا میکند.
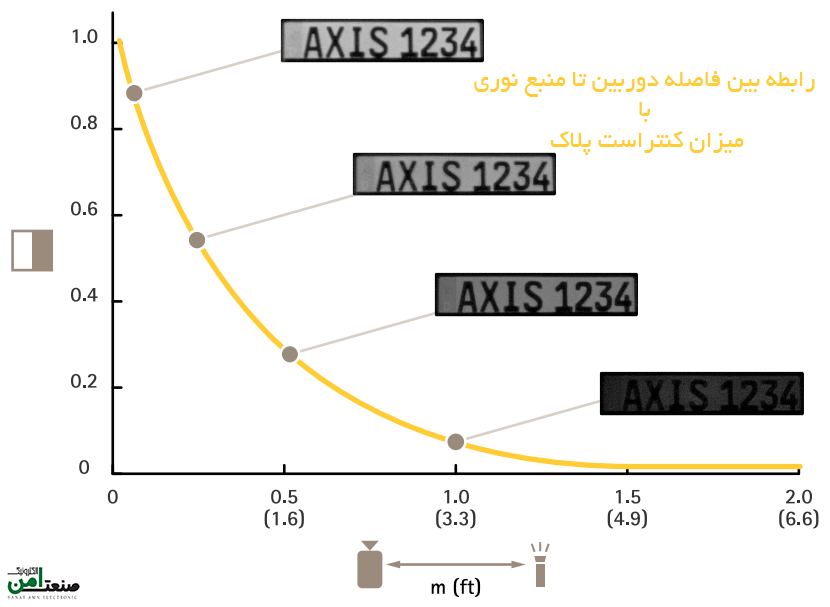
منبع نوری IR بهتر است به صورت موازی با دوربین تنظیم شود. بدین ترتیب از تابش نور به بخشی از جاده که در میدان دید دوربین است، مطمئن میشویم. در نمودار زیر بصورت کامل رابطه بین فاصله دوربین تا منبع نوری با میزان کنتراست پلاک را مشاهده میکنید. هر چقدر فاصلهی بین دوربین تا منبع نوری بیشتر شود، کنتراست پلاک نیز کمتر میشود. پس در طراحیها باید به این نکته ساده ولی مهم دقت کرد.
3- مکان نصب دوربین پلاکخوان
مکان نصب اصولی دوربین مداربسته پلاک خوان را با توجه به فرمولهای ریاضی در ادامه آوردهایم:
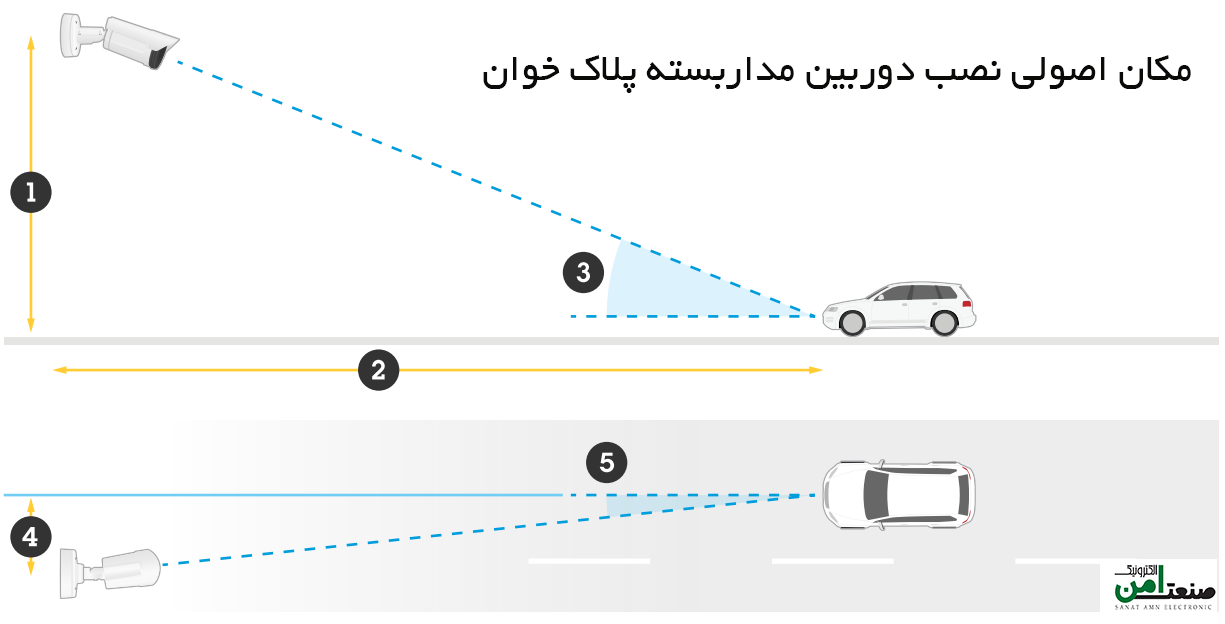
در تصویر بالا شماره 1 بیانگر ارتفاع نصب دوربین روی دکل با حرف h، شماره 2 بیانگر متراژ کپچر تصویر با حرف dc، شماره 3 بیانگر زاویه عمودی بین دوربین و مسیر حرکت خودرو، شماره 4 بیانگر فاصله از مرکز جاده dr، شماره 5 زاویه افقی بین دوربین مداربسته پلاک خوان و مسیر حرکت خودرو است.
3.1- زاویه بین دوربین پلاک خوان و ماشین
توصیه میشود که زاویه بین دوربین و جهت حرکت ماشین حداقل باشد. شما بهتر است مکان نصب دوربین را مستقیم بالای خودرو قرار دهید. برای جلوگیری از کور شدن دید دوربین با نور شدید، یک ایده خوب، قرار دادن دوربین بالاتر از چراغهای جلوی اتوموبیل است. توصیه میشود که زاویه بین دوربین و جهت حرکت خودرو را به حداقل برسانید، در جداول زیر زاویه بین دوربین و ماشین برای برخی ارتفاع نصب ها، فواصل جاده و متراژ ثبت شده است.
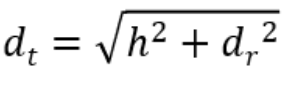
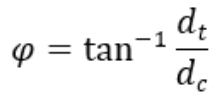
زاویه کل بین دوربین و مسیر حرکت ماشین با فرمول های زیر محاسبه میشود. فاصله عرضی بین دوربین و جاده با dt و h ارتفاع نصب دوربین بر حسب متر و dr متراژ جاده بر حسب متر است.
زاویه بین دوربین و ماشین از فرمول زیر محاسبه میشود. dt فاصله عرضی بر حسب متر بین دوربین و جاده و dc متراژ کپچر بر حسب متر است.
پیشنهاد میشود تا زوایا زیر 30 درجه باشد. در جداول زیر زاویه بین دوربین و ماشین برای برخی از ارتفاع های نصب متراژ جاده و متراژ کپچر محاسبه شده است.
زاویه دوربین در dr=0، اعداد ستارهدار نشان میدهند که زاویه برای LPC خیلی بزرگ است.
| فاصله کپچر 5 متری | فاصله کپچر 10 متری | فاصله کپچر 20 متری | فاصله کپچر 30 متری | فاصله کپچر 50 متری | |
| در ارتفاع 1.5 متری | 17 درجه | 8.5 درجه | 4.3 درجه | 2.9 درجه | 1.7 درجه |
| در ارتفاع 3 متری | 31 درجه* | 17 درجه | 8.5 درجه | 5.7 درجه | 3.4 درجه |
| در ارتفاع 5 متری | 45 درجه * | 27 درجه | 14 درجه | 9.5 درجه | 5.7 درجه |
| در ارتفاع 7 متری | 54 درجه * | 35 درجه * | 19 درجه | 13 درجه | 8 درجه |
| در ارتفاع 10 متری | 63 درجه * | 45 درجه * | 27 درجه | 18 درجه | 11 درجه |
زاویه دوربین در dr=2، اعداد ستارهدار نشان میدهند که زاویه برای LPC خیلی بزرگ است.
| فاصله کپچر 5 متری | فاصله کپچر 10 متری | فاصله کپچر 20 متری | فاصله کپچر 30 متری | فاصله کپچر 50 متری | |
| در ارتفاع 1.5 متری | 27 درجه | 14 درجه | 7.1 درجه | 4.8 درجه | 2.9 درجه |
| در ارتفاع 3 متری | 36 درجه * | 20 درجه | 10 درجه | 6.9 درجه | 4.1 درجه |
| در ارتفاع 5 متری | 47 درجه * | 28 درجه | 15 درجه | 10 درجه | 10 درجه |
| در ارتفاع 7 متری | 56 درجه * | 36 درجه * | 20 درجه | 14 درجه | 14 درجه |
| در ارتفاع 10 متری | 64 درجه * | 46 درجه * | 27 درجه | 19 درجه | 19 درجه |
زاویه دوربین در dr=5، اعداد ستارهدار نشان میدهند که زاویه برای LPC خیلی بزرگ است.
| فاصله کپچر 5 متری | فاصله کپچر 10 متری | فاصله کپچر 20 متری | فاصله کپچر 30 متری | فاصله کپچر 50 متری | |
| در ارتفاع 1.5 متری | 46 درجه * | 28 درجه | 15 درجه | 9.9 درجه | 6 درجه |
| در ارتفاع 3 متری | 49 درجه * | 30 درجه | 16 درجه | 11 درجه | 6.7 درجه |
| در ارتفاع 5 متری | 55 درجه * | 35 درجه * | 19 درجه | 13 درجه | 8 درجه |
| در ارتفاع 7 متری | 60 درجه * | 41 درجه * | 23 درجه | 16 درجه | 9.8 درجه |
| در ارتفاع 10 متری | 66 درجه * | 48 درجه * | 29 درجه | 20 درجه | 13 درجه |
زاویه دوربین در dr=7، اعداد ستارهدار نشان میدهند که زاویه برای LPC خیلی بزرگ است.
| فاصله کپچر 5 متری | فاصله کپچر 10 متری | فاصله کپچر 20 متری | فاصله کپچر 30 متری | فاصله کپچر 50 متری | |
| در ارتفاع 1.5 متری | 55 درجه * | 36 درجه * | 20 درجه | 13 درجه | 8.1 درجه |
| در ارتفاع 3 متری | 57 درجه * | 37 درجه * | 21 درجه | 14 درجه | 8.7 درجه |
| در ارتفاع 5 متری | 60 درجه * | 41 درجه * | 23 درجه | 16 درجه | 9.8 درجه |
| در ارتفاع 7 متری | 63 درجه * | 45 درجه * | 26 درجه | 18 درجه | 11 درجه |
| در ارتفاع 10 متری | 68 درجه * | 51 درجه * | 31 درجه * | 22 درجه | 14 درجه |
3.2- ترازبندی نصب دوربین
زاویه نصب دوربین مداربسته باید به گونهای تنظیم شود که پلاک خودرو با لبه های تصویر موازی باشد. فاصله کپچر، مسافت بین دوربین و قسمتی از جاده که کپچر میشود، نام دارد.

3.3- عمق میدان دید دوربین
دوربین برای گرفتن تصویر شارپ و قابل خواندن نیاز به فوکوس روی شماره پلاک خودرو دارد. بازهای که تصویر در آن قابل قبول است در رنج فاصلهی کانونی با نام DOF یا عمق میدان دید قرار دارد. DOF می تواند با کاهش سایز آیریز (Iris) دریچه دیافراگم بیشتر شود.

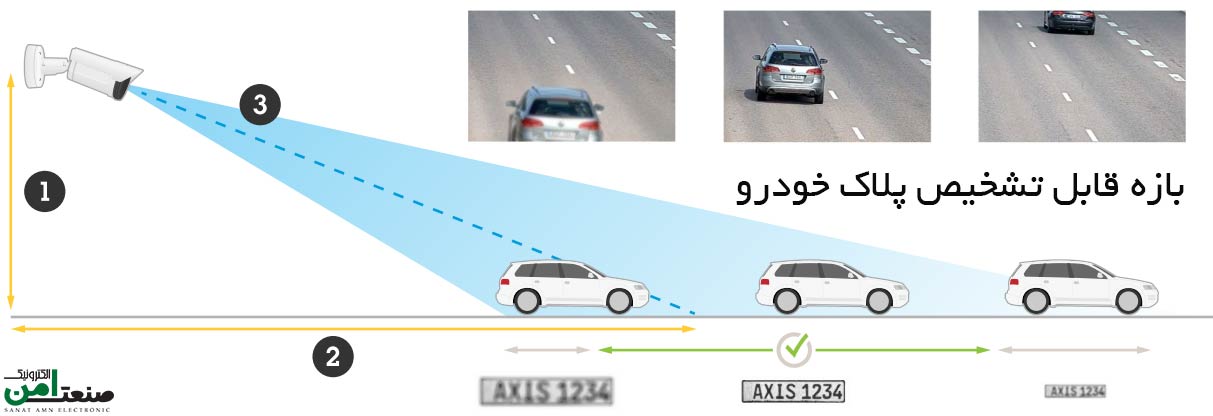
3.4- رنج قابل دیدن
محدوده قابل تشخیص، محدوده فواصل جادهای است که در آن پلاک در تصویر قابل مشاهده و خواندن است. در حالت ایده آل رنج قابل مشاهده، میدان دید کامل دوربین مداربسته است، اما این همیشگی نیست. شرایط آب و هوایی مانند باران، برف و مه سبب محدودیت در کپچر تصویر در فواصل طولانی شده که منجر به محدودیت در رنج قابل تشخیص دوربین میشود.
در روز و در شرایط آب و هوایی خوب، رنج قابل تشخیص با مسافت کپچر طولانی، افزایش پیدا میکند. برای خودروهایی که در بزرگراهها با سرعت بالا حرکت میکنند، استفاده از مسافت کپچر طولانی تر نیاز است. زیرا باید زمان کافی برای خواندن شماره پلاک قبل از خروج خودرو از میدان دید دوربین فراهم باشد.
3.5- فواصل کپچر پیشنهادی
برای خودروهایی با سرعت مختلف حداقل مسافت کپچر در جدول زیر آمده است:
| سرعت 10 کیلومتر بر ساعت | سرعت 30 کیلومتر بر ساعت | سرعت 50 کیلومتر بر ساعت | سرعت 80 کیلومتر بر ساعت | سرعت 100 کیلومتر بر ساعت | سرعت 130 کیلومتر بر ساعت |
| نیاز به حداقل 4 متر برای کپچر تصویر | نیاز به حداقل 7 متر برای کپچر تصویر | نیاز به حداقل 11 متر برای کپچر تصویر | نیاز به حداقل 24 متر برای کپچر تصویر | نیاز به حداقل 27 متر برای کپچر تصویر | نیاز به حداقل 30 متر برای کپچر تصویر |
حداقل مسافت کپچر وابسته به سرعت خودرو است. اعداد جدول بر اساس زمان تشخیص در حدود 0.2 ثانیه برآورد شده است. که این به معنای این هست که نرم افزارهای آنالیز می توانند 5 فریم در ثانیه را آنالیز کنند.
نکته مهم: تعداد فریمهایی که در ثانیه آنالیز میشوند به نرم افزار LPR، پردازشگرها و رزولوشن دوربین مداربسته پلاک خوان وابسته است.
در شب، حداکثر مسافت کپچر اغلب به توان IR خارجی وابسته است.
4- تنظیمات فنی دوربین مداربسته پلاک خوان
هنگام استفاده از یک دوربین LPR، حتما باید تعدادی تنظیم روی دوربین در حالت دیفالت آن انجام شود.
4.1- حداکثر زمان شاتر
اگر مدت زمان شاتر خیلی زیاد باشدف تصویر خودروهایی که در حال حرکت هستند بصورت موشن بلور میشوند. حداکثر زمان شاتر وابسته به ترازبندی دوربین با سرعت خودرو است. جدول زیر حداکثر زمان شاتر را نشان میدهد که وابسته به زاویه بین دوربین، مسیر حرکت و سرعت خودرو است. زاویه دوربین میتواند طبق جدول زیر تخمین زده شود.

حداکثر زمان شاتر وابسته به زاویه دوربین و سرعت خودرو است.
| سرعت خودرو تا 30 کیلومتر بر ساعت | سرعت خودرو تا 50 کیلومتر بر ساعت | سرعت خودرو تا 80 کیلومتر بر ساعت | سرعت خودرو تا 110 کیلومتر بر ساعت | سرعت خودرو تا 130 کیلومتر بر ساعت | |
| زاویه دوربین 5 درجه | 19.3 میلی ثانیه | 11.6 میلی ثانیه | 7.2 میلی ثانیه | 5.3 میلی ثانیه | 4.5 میلی ثانیه |
| زاویه دوربین 10 درجه | 9.7 میلی ثانیه | 5.8 میلی ثانیه | 3.6 میلی ثانیه | 2.6 میلی ثانیه | 2.2 میلی ثانیه |
| زاویه دوربین 15 درجه | 6.5 میلی ثانیه | 3.9 میلی ثانیه | 2.4 میلی ثانیه | 1.8 میلی ثانیه | 1.5 میلی ثانیه |
| زاویه دوربین 20 درجه | 4.9 میلی ثانیه | 2.9 میلی ثانیه | 1.8 میلی ثانیه | 1.3 میلی ثانیه | 1.1 میلی ثانیه |
| زاویه دوربین 25 درجه | 4 میلی ثانیه | 2.4 میلی ثانیه | 1.5 میلی ثانیه | 1.1 میلی ثانیه | 0.9 میلی ثانیه |
| زاویه دوربین 30 درجه | 3.4 میلی ثانیه | 2 میلی ثانیه | 1.3 میلی ثانیه | 0.9 میلی ثانیه | 0.8 میلی ثانیه |
دوربین مداربسته نور بیشتری با یک زمان شاتر بالاتر را جمع آوری خواهد کرد. این سبب افزایش رنج آی آر خواهد بود. برای مثال، با نصب دوربین با 5 درجه بجای 20 درجه، زمان شاتر تقریبا 4 برابر افزایش و رنج آی آر نیز دو برابر خواهد شد.
4.2- حداکثر گین
پلاک خودرو از مواد بازتابی ساخته شده است، پس در معرض تابش شدید نور IR، به شدت میدرخشد و پلاک بیش از حد در معرض نور قرار گرفته و خواندن آن غیر ممکن میشود. سادهترین روشی که سبب جلوگیری از نوردهی بیش از حد روی پلاک خودرو میشود، محدود کردن حداکثر گین دوربین است. بطور دقیق، تنظیم حداکثر گین به توان IR، فاصله تا وسیله نقلیه و حساسیت به نور دوربین بستگی دارد.

4.3- WDR
رنج داینامیکی وسیع یا همان WDR شامل تکنیکهای مختلفی برای افزایش رنج داینامیکی یک تصویر است. کاربرد WDR برای دیدن جزییات که در سایه مشخص نیستند، یا مانع کور شدن دوربین توسط نورهای شدید میشوند، استفاده میشود. WDR سبب تولید حرکات مصنوعی در تصاویری که خودروها در حال حرکت هستند، میشود. بدین منظور پیشنهاد میشود که برای تشخیص پلاک WDR را خاموش کنیم.

نرم افزار تشخیص پلاک
بعد از کپچر کردن یک استریم ویدیو پلاک، یک نرم افزار آنالیز خاص برای جداسازی عدد پلاک از تصویر نیاز هست. عملکرد سیستم LPR علاوه بر تنظیمات دوربین، به پیکربندی نرم افزار LPR نیز بستگی دارد.
نرم افزار LPR میتواند بصورت مستقیم روی یک دوربین یا یک سرور نصب شود. پردازش روی سرور بسیار سنگین است و باید استریم ویدیو به مکان دیگری منتقل شود. این نیاز به پهنای باند بیشتری دارد. یک سیستم مبتنی بر سرور برای تعداد بالای دوربین، استریم زیادی از شبکه میگیرد.
نرم افزار LPR روی خود دوربین به معنای این هست که فقط حروف پلاک و اعداد نیاز به ارسال از دوربین به سرور مرکزی را دارند. (اگرچه خروجی شامل یک تصویر از پلاک و یک محتواست). این پهنای باند شبکه را به حداقل میرساند. افزودن دوربین جدید به سیستم در این حالت آسانتر هست.
جنبه منفی الگوریتمهای LPR روی دوربین، محدودیت توان پردازشی است، که آنالیز هر تصویر را در مدت زمان بیشتری انجام میدهد. این حداکثر رزولوشنی را که میتواند استفاده کند، محدود میکند. توسعه هر نوع جدیدی از آنالیز تصاویر از طریق AI و شبکه عصبی، دوربینها را توانمند کرده است. الگوریتمهای موثرتر با پردازشگرهای امبدد، مدت زمان آنالیز هر تصویر را کاهش و سیستم توزیع را رقابتی میکند.
پلاک خوانی یا پلاک بینی
در آخرین بند از این مقاله تخصصی قصد دارم تکلیف دو عبارت را مشخص کنم. در حال حاضر برندهای زیادی در بازار نظارت تصویری ایران در زمینه پلاک خوانی و دوربین های تشخیص پلاک فعالیت دارند. نکتهای که در این مورد به نظرم قابل تامل هست، بحث پلاک خوانی و پلاک بینی میباشد. این دو مقوله استانداردهای کاملا متفاوتی با هم دارند و نباید آنها را یکسان دانست. ما در این مقاله و بر اساس منبع معتبر کمپانی اکسیز(اکسیس) AXIS در مورد پلاک خوانی صحبت کردیم. هر کدام از همکاران محترم میتوانند تجربیات متفاوتی از نصب دوربین مداربسته پلاک خوان در پروژههای خود داشته باشند، که الزاما با این موارد اشاره شده در متن بالا همخوانی نداشته باشد. باعث افتخار ماست که از تجارب خود در زیر این مقاله برای ما بنویسید.
برخی مطالب تخصصی در حوزه دوربین مداربسته
1- تولید دوربین مداربسته ایرانی و ساخت یا مونتاژ آن در بازار ایران
2- نرم افزار مدیریت تصویر SMART PSS(اسمارت پی اس) برای دوربینهای کورتک و داهوا
3- همه چیز در مورد سنسور تصویر Image SenSor دوربین مداربسته
4- آموزش گام به گام انتقال تصویر P2P روی موبایل